
St-Gallen, Appenzell, ThurgauUnterwegs
"AmiGo" - Autonome Mitfahrgelegenheiten in der Ostschweiz
Autonome elektrische Mobilität auf Abruf durch PostAuto, Start in der Ostschweiz 2027
Veranlasst durch Post AutoSchweizerischer Verband für autonome Mobilität

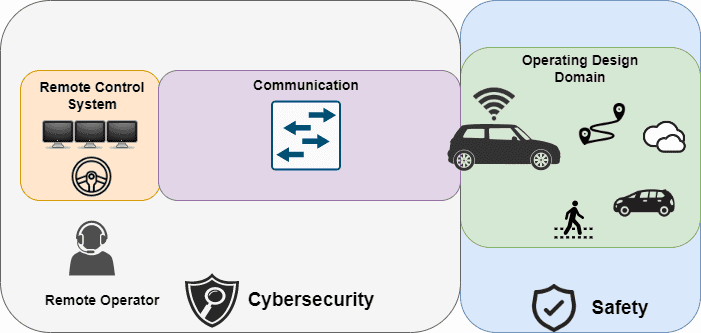







In diesem Forschungsprojekt ging es darum, Mindestanforderungen für die Fernüberwachung von automatisierten Fahrzeugen in der Schweiz festzulegen, wobei die Fahrzeuge in notwendigen Situationen durch ein Fernbedienungssystem gesteuert werden können.
Lesen Sie den Abschlussbericht (D/F/E)
Ab dem 1. März 2025 tritt in der Schweiz die Verordnung über das automatisierte Fahren (VAF) in Kraft. Dieser Forschungsbericht konzentriert sich auf den dritten Anwendungsfall der Verordnung, der zum ersten Mal die Mindestanforderungen für Fernsteuerungssysteme definiert. Diese Anforderungen sind entscheidend, um die sichere und effiziente Fernsteuerung von fahrerlosen Fahrzeugen auf zugelassenen Strecken zu gewährleisten.
Durch die Analyse von Sicherheits- und Regulierungsaspekten leistet der Bericht einen wichtigen Beitrag zur praktischen Umsetzung der VAF.
Diese Studie schafft eine umfassende wissenschaftliche Grundlage für die behördliche Zulassung von Fernbedienungssystemen und bietet praktische Leitlinien für die Beteiligten der Branche.
Durch die Festlegung klarer Bewertungskriterien trägt das Projekt dazu bei, die Zukunft des ferngesteuerten Fahrzeugbetriebs zu gestalten und sowohl die Sicherheit als auch die Effizienz der automatisierten Mobilität zu gewährleisten.
Autonome elektrische Mobilität auf Abruf durch PostAuto, Start in der Ostschweiz 2027
Veranlasst durch Post Auto
Europäisches Projekt zur Entwicklung eines Rahmens für die Verbindung und Koordination aller Mobilitätsarten.
Initiiert von Horizon Europe
Autonomes Shuttle-Projekt in Arbon, das die Altstadt mit wichtigen Orten verbindet - intelligent, nachhaltig und zukunftsorientiert.
Initiiert von der TGA Arbon
CCAM-ERAS treibt den sozioökonomischen Übergang zu vernetzter, kooperativer und automatisierter Mobilität voran.
Initiiert von der Europäischen Union
Pilotprojekt im schweizerischen Furttal testet automatisierte Fahrzeuge zur Verbesserung des öffentlichen Nahverkehrs mit bedarfsgesteuerten Nahverkehrsangeboten
Initiiert durch den Kanton Zürich